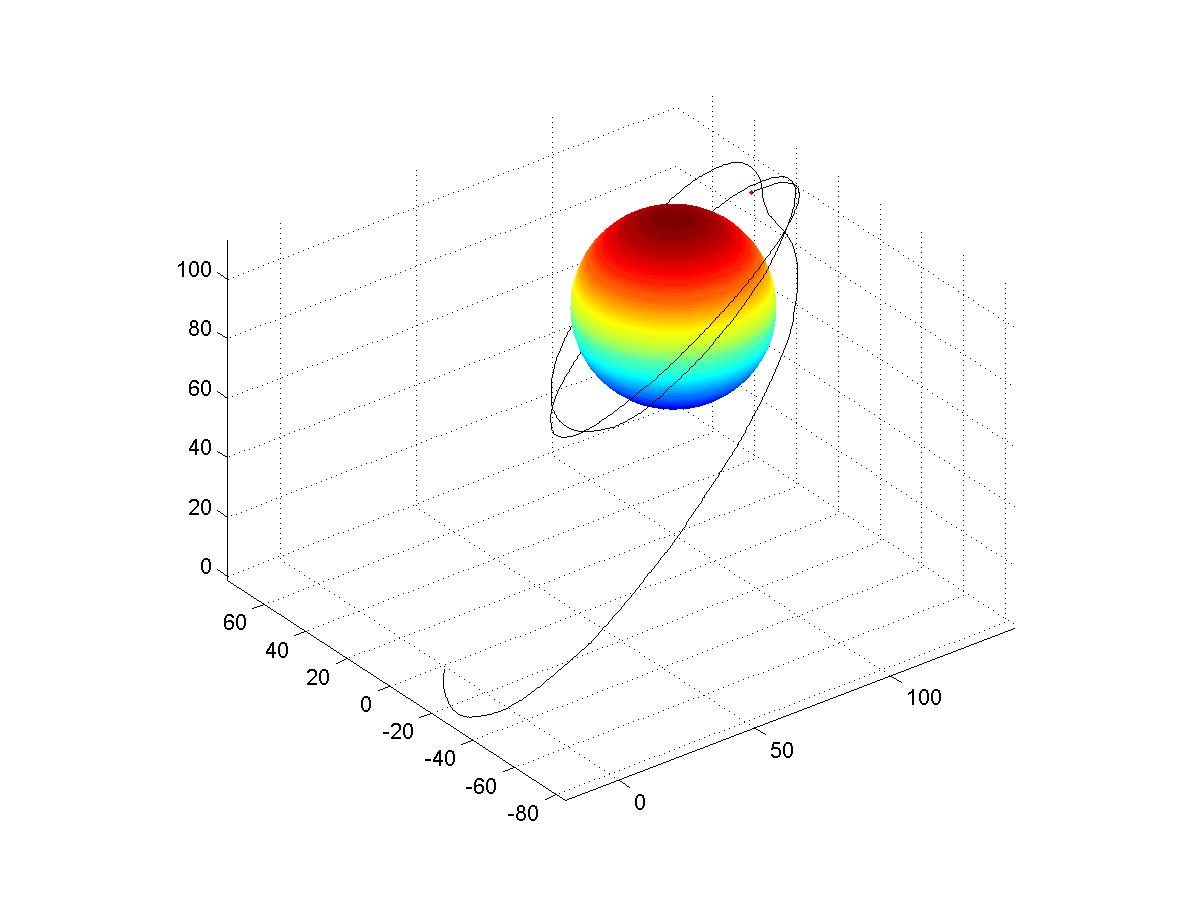
These two movies demonstrates
the boundary tracking control law we developed in:
Fumin Zhang,
Eric Justh and P. S. Krishnaprasad, “Boundary
Following using Gyroscopic Control,”
Proceedings
of IEEE Conference on Decision and Control 2004, 5204-5209. Preprint [bibtex].
Fumin Zhang, Alan O’Connor, Derek Luebke and P.S. Krishnaprasad, “Experimental
Study of Curvature-based Control Laws for Obstacle Avoidance,”
in Proc. of 2004 IEEE International Conference on Robotics and Automation,
3849-3854, New Orleans, USA, April 26-May 1, 2004. Preprint [bibtex]
The demos took place in University of Maryland, College Park. |