
| Buzzards Bay Experiment Mar. 2006 |
||
 |
||
Together with Oceanographers from the Woods Hole Oceanographic Institutes (WHOI), I implemented a pattern control law for a fleet of two Slocum underwater gliders. We carried experiments in Buzzards Bay, MA from March 6 to 17, 2006. |
||
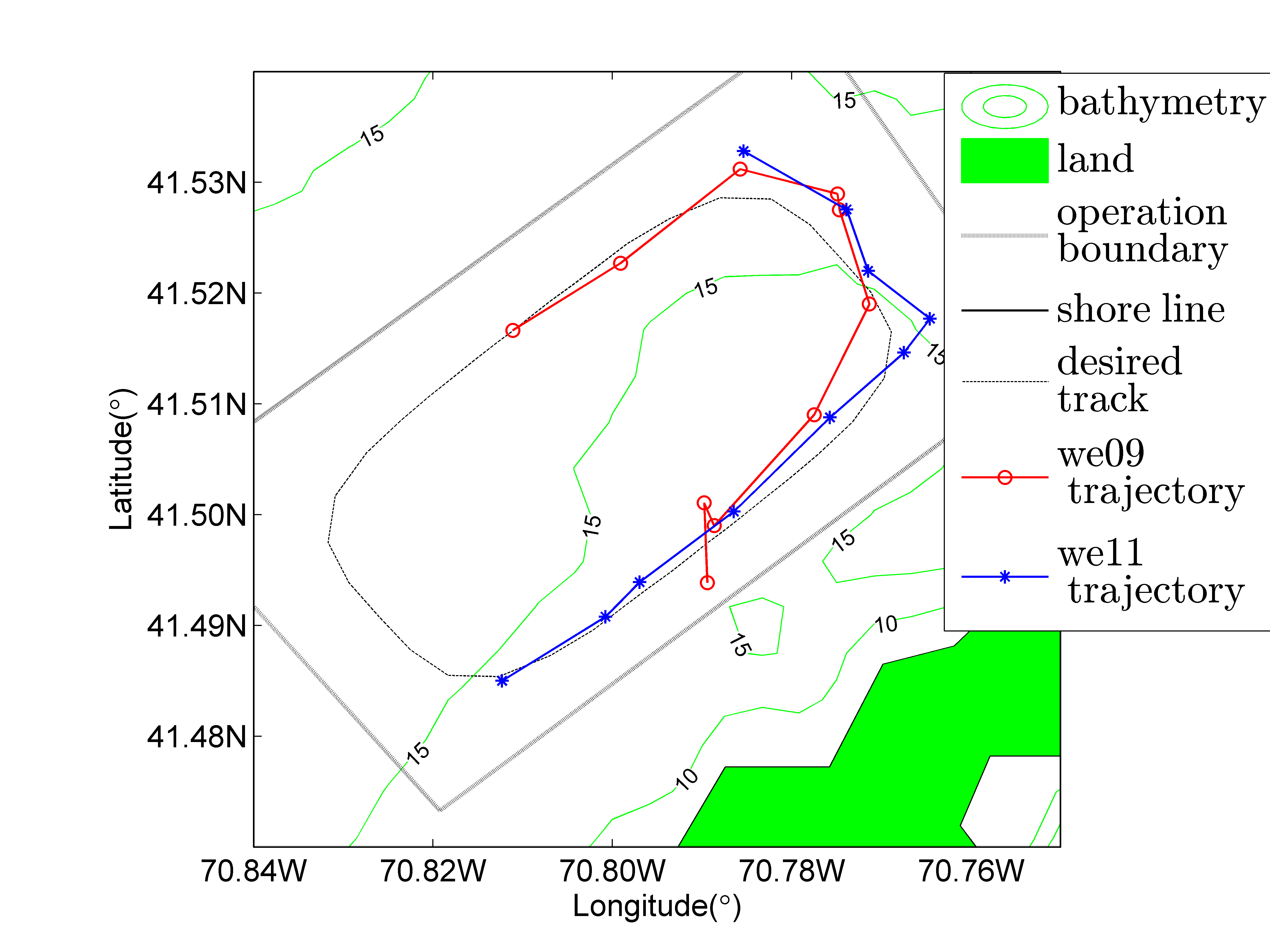 |
Five battery-powered Slocum gliders were deployed during the experiment. Three of the gliders had to be put out of service due to hardware problems and environmental hazards. Our control law was applied to the remaining two gliders named ’we09’ and ’we11’. The goal was to control an invariant pattern on a super-ellipse track within a rectangular region to the west of Naushon Island in Buzzards Bay. The dimensions of the rectangle were approximately 5.9km (along-shore) by 3.3km (cross-shore). Near the Woods Hole Oceanographic Institute (WHOI), this region is the largest area without threats such as underwater rock piles and commercial ship traffic. The super-ellipse track is centeredd at longitude −70.8003 , latitude 41.5070 with its major axis pointing to the along-shore direction at azimuth 40 . The dimension of the super-ellipse is 5.6km by 2.8km. For the invariant pattern, the desired separation between the two gliders is pi/3 measured by curve phase. | |
Fumin Zhang and Naomi E. Leonard, "Coordinated Patterns of Unit Speed Particles on a Closed Curve," Systems and Control Letters, 56(6), 397-407, 2007. Preprint [bibtex]