YIP: Generic Environment Models (GEMs) for Agile Marine Autonomy Award Number: N00014--10—1—0712
LONG-TERM GOALSThis project builds a roadmap to achieve agile marine autonomy that endows unmanned marine systems with ability to take fast responses to environmental changes. WORK COMPLETED We have developed generic environmental modeling in two applications using different types of AUVs. We have used a YSI Ecomapper for bathymetry survey, where the GEM is built to represent the bathymetry data. We have also used underwater gliders for ocean sampling, where the GEM is built to represent ocean flow.
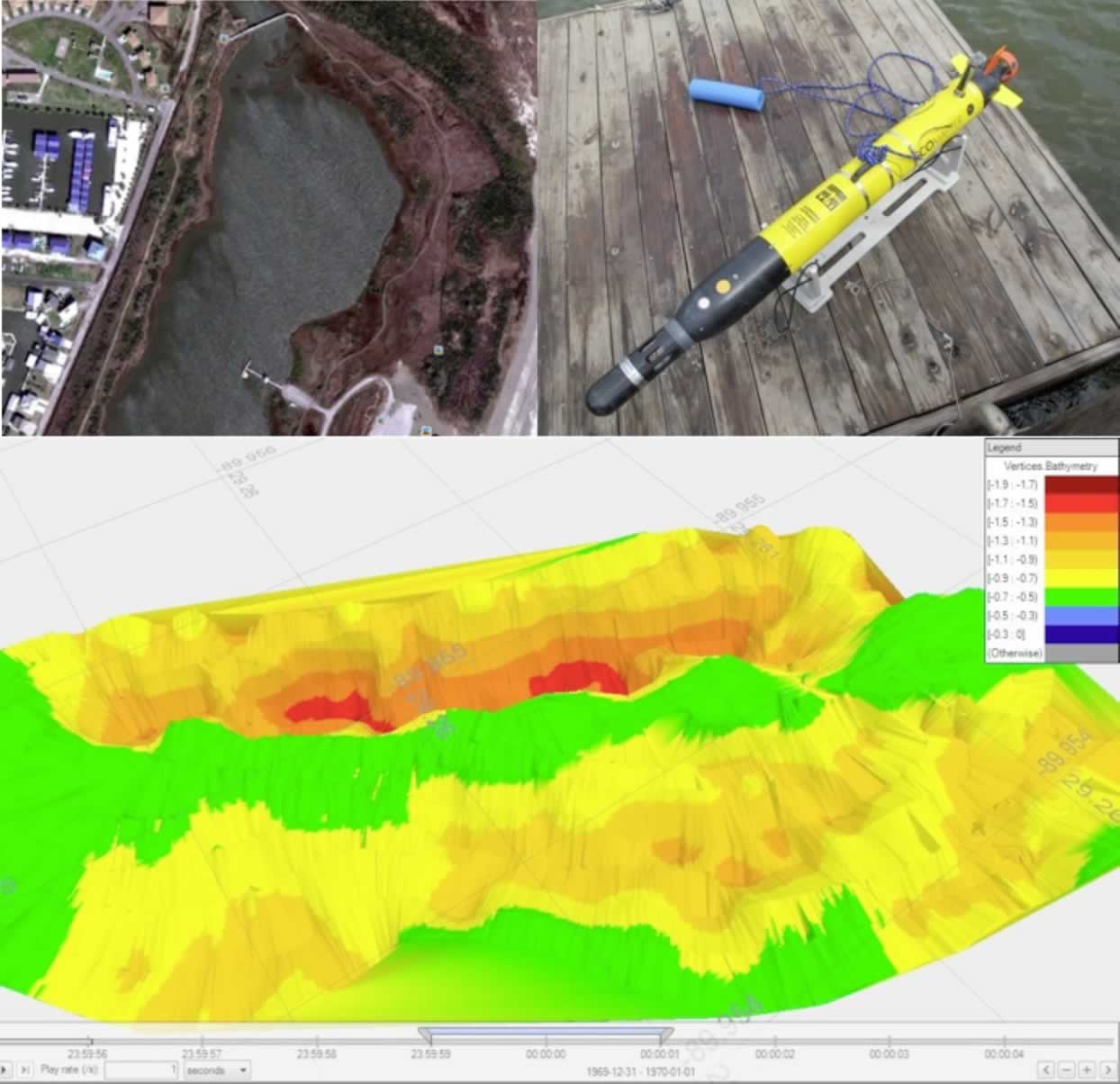
Figure 1. Bathymetry survey using an YSI Ecomapper for a retention pond in Grand Isle State Park, LA
The EcoMapper (Figure 1, upper right) is an autonomous underwater vehicle purchased from YSI Inc. It is operated through “Windows remote desktop” via Wi-fi. GPS is available for localization on water surface and DVL (Doppler Velocity Log) is employed for localization underwater relative to the bottom. Our Ecomapper is also equipped with Conductivity and Temperature Sensors, Depth Sensor (measure depth from surface), Depth-Sounding sonar (measures height from bottom) and Three-axis digital compass. If operating in the autonomous mode, the EcoMapper follows a predefined course, either on surface or below surface and records all sensor measurements into log files. As part of an NSF funded project “Autonomous Control and Sensing Algorithms for Surveying the Impacts of Oil Spills on Coastal Environments” led by the PI, the EcoMapper was deployed to survey the tidal lagoon located at the Grand Isle State Park (Figure 1, upper left) in Louisiana where oil pollutions have been spotted in 2010. Five autonomous missions between surface and 0.5 meters below surface were executed. By interpolating the DVL data, we obtained a bathymetry map for this pond (Figure 1, bottom). The salinity of the lagoon varies between 13ppt and 17ppt under different weather condition.
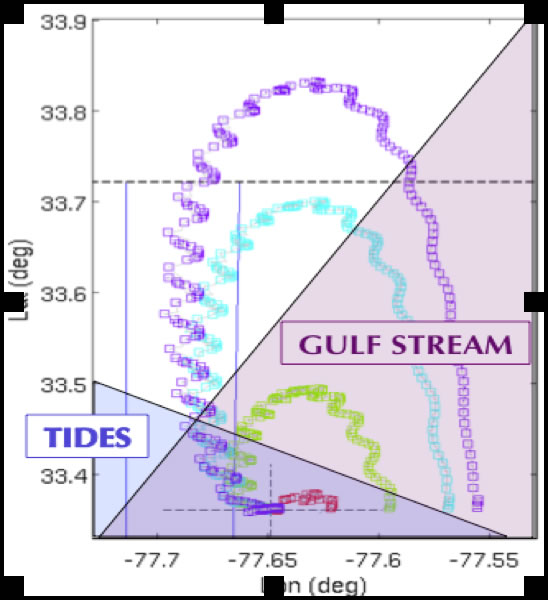
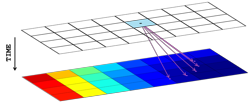
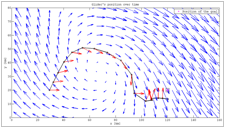
Figure 2. A station-keeping algorithm produces paths of simulated gliders in Long Bay, SC. A GEM is developed to combine tides and the gulfstream. A dynamic programming approach has been implemented to generate optimal paths for an underwglider to maintain minimal distance from a set goal point under the influence of flow. This approach uses a cost function that integrates the glider’s distance from the goal over a finite time horizon. The domain of operation is discretized in both space and time, and the cost-to-go and associated optimal control actions are computed at each point in the discretized domain, starting at the final time (see Figure 4). The glider’s position is then integrated forward using a simple particle model for the glider dynamics. At each time step in the integration, the glider’s control action (e.g. the choice of heading angle) is taken to be a bilinear interpolation of the optimal control actions at the nearest states in the discretized domain. The glider’s total velocity is taken as a sum of the glider’s through-water velocity and the predicted flow velocity, which is obtained from the GEM used. This gives a near-optimal trajectory that can be converted to a waypoint list to be passed to the glider.
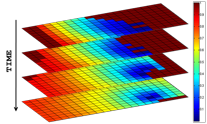
RESULTS We use controlled Lagrangian particle tracking (CLPT) to evaluate the accuracy of the simulated glider position. Errors in glider position simulation are due to limited resolution of ocean models, missing physics in the models, and sparseness of available ocean measurements used to drive the model. Using a modified Langevin equation to model the growth of the expected glider position error (termed CLPT error), we have shown that the magnitude of the expected error in simulated position grows exponentially until reaching a lower bound equal to twice the grid size of the ocean model used (see Figure 5). The error growth then slows to a polynomial function of time. PUBLICATIONS Journal articles: W. Wu and F. Zhang, “Cooperative Exploration of Level Surfaces of Three Dimensional Scalar Fields,” Automatica, the IFAC Journal 47(9): 2044-2051, 2011. [published, refereed] K. Szwaykowska and F. Zhang, “Trend and Bounds for Error Growth in Controlled Lagrangian Particle Tracking,” IEEE Journal of Oceanic Engineering, 2011. [submitted, refereed] Refereed Conference Proceedings: K. Szwaykowska and F. Zhang, “A Lower Bound for Controlled Lagrangian Particle Tracking Error, ” in Proc.49th IEEE Conference on Decision and Control (CDC 2010), 4353-4358, 2010. [published, refereed] K. Szwaykowska and F. Zhang, “A Lower Bound on Navigation Error for Marine Robots Guided by Ocean Circulation Models ,” in Proc. 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2011). [published, refereed] HONORS/AWARDS/PRIZES Recipient: Fumin Zhang Recipient: Fumin Zhang Recipient: Fumin Zhang Recipient: Fumin Zhang Recipient: Georgia Tech Savannah Robotics (Supervised by Fumin Zhang)
|