
Automation Middleware and Algorithms for Robotic Underwater Sensor Networks(06/01/2008-05/30/2011)Dr. Fumin Zhang Award Number: N00014--08--1--1007 |
|||||
|
|
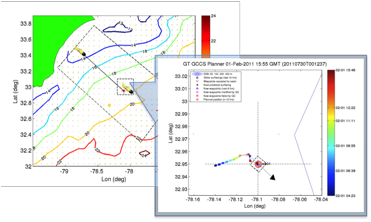
(b) A glider controlled to hold position at (-78.1°, 32.95°). Colored rectangles represent glider surfacing positions with corresponding time in the color bar on the left. |
|
Figure 4. In (a), outer dotted box represents the domain of the Long Bay project, inner dotted box is used for the main focus region for a mooring glider, and the desired position for the mooring is represented as a red dot at (-78.1°, 32.95°).The colored contours represent SST field in the domain, and the arrows covering the entire field show the flow field in the domain. In (b), GCCS generates paths for the glider to hold station under strong current. |
|
As lab based test-bed, we have developed a remotely operative vehicle (ROV) that has won a design excellence award in the 2009 MATE international ROV competition, and won the Martin Klein MATE Mariner Award in 2011. A robot ship is developed and placed 7th in the 4th AUVSI/ONR International RoboBoat Competition.
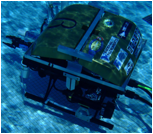
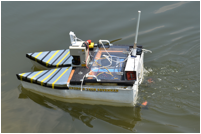
Figure 5. Left: A remotely operated vehicle ROV-Beta developed by PI’s undergraduate team. Right: Autonomous Ship Victoria in the 4th AUVSI and ONR International RoboBoat competition.
RESULTS
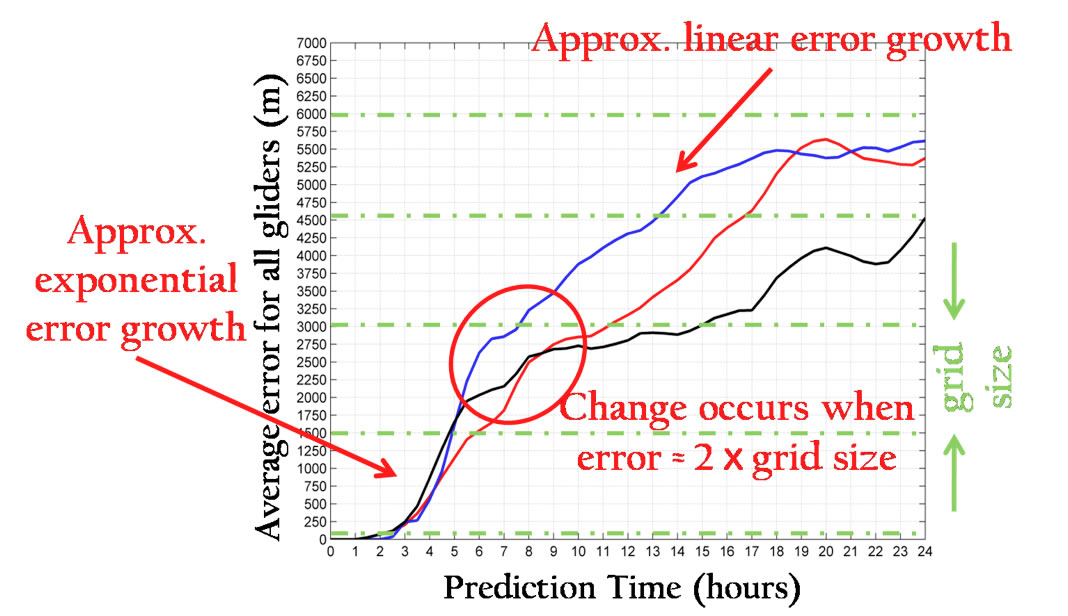
- We discovered similar behaviors for all three ocean models regarding the averaged CLPT error in Figure 1. The error first grows exponentially until it reaches twice the grid size. After that, the error grows linearly. By establishing the theory of CLPT, we are able to explain this similarity and generalize this conclusion. We made the discovery that this behavior is unique to controlled Lagrangian particles i.e. marine robots under the guidance of finite resolution ocean models. We also theoretically proved that the bounded error growth is not a repeatable phenomena observed on drifters without active control. Further test and analysis on experimental data are planned in the Long Bay experiment on gliders to confirm our theory.
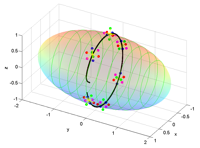
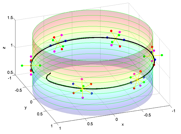
- Cooperative filtering and exploration behavior are fundamental building blocks for autonomy of networked unmanned marine systems. Our theoratical developments show that cooperative filtering can be used to explore both 2D and 3D scalar fields.
- The automation middleware systems have been proved to be effective and convenient in automatic mission planning and path planning for autonomous marine robots. The middelware systems will see contiue usage and wider adoptions in ocean sensing experiments.
IMPACT/APPLICATIONS
The infrastructure we are developing will lead to the fully automated operation of underwater robotic sensor networks that are persistent and intelligent in a constantly changing ocean environment. On top of the operation automation that results in autonomy, the data flow in and out of the autonomy is automated. This impacts not only the gathering of data, but also the assimilation of the gathered data and the improvements of ocean models.
REFERENCES
Boyd, S. and L. Vandenberghe (2004), “Convex Optimization,” Cambridge University Press.
Jazwinski, A. H. (1970), “Stochastic Processes and Filtering Theory,” Academic Press, New York.
Leonard, N. E., E. Paley, F. Lekien, R. Sepulchre, D. M. Fratantoni, and R. E. Davis. (2007), “Collective motion, sensor networks, and ocean sampling,” Proc. of the IEEE, 95:1, 48-74.
Sawaragi, Y., H. Nakayama, et al. (1985), “Theory of Multiobjective Optimization,” New York, NY, Academic Press.
Stengel, R. F. (1994), “Optimal Control and Estimation,” New York, Dover Publications.
Zhang, F., K. Szwaykowska, et al. (2008), “Task Scheduling for Control Oriented Requirements for Cyber-Physical Systems,” Proceedings of RTSS 2008, 47-56.
REFERENCES
Jazwinski, A. H. (1970), “Stochastic Processes and Filtering Theory,” Academic Press, New York.
Leonard, N. E., E. Paley, F. Lekien, R. Sepulchre, D. M. Fratantoni, and R. E. Davis. (2007), “Collective motion, sensor networks, and ocean sampling,” Proc. of the IEEE, 95:1, 48-74.
Stengel, R. F. (1994), “Optimal Control and Estimation,” New York, Dover Publications.
Zhang, F., K. Szwaykowska, et al. (2008), “Task Scheduling for Control Oriented Requirements for Cyber-Physical Systems,” Proceedings of RTSS 2008, 47-56.
Szwaykowska, K. and F. Zhang (2010). A Lower Bound for Controlled Lagrangian Particle Tracking Error. Proc. 49th IEEE Conference on Decision and Control (CDC 2010), 4353-4358.
Szwaykowska, K. and F. Zhang (2011), “A Lower Bound on Navigation Error for Marine Robots Guided by Ocean Circulation Models ,” in Proc. 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2011), accepted.
Wu, W. and F. Zhang (2011), “Cooperative Exploration of Level Surfaces of Three Dimensional Scalar Fields,” Automatica, the IFAC Journal 47(9) 2044-2051.
Szwaykowska, K. and F. Zhang (2011b), “Trend and Bounds for Error Growth in Controlled Lagrangian Particle Tracking,” IEEE Journal of Oceanic Engineering, Submitted on May 6th, 2011.
PUBLICATIONS
Journal articles:
Kim, J., F. Zhang, and M. Egerstedt (2009), “Curve Tracking Control for Autonomous Vehicles with Rigidly Mounted Range Sensors,” Journal of Intelligent and Robotic Systems, 56(1-2): 177-197. [published, refereed]
Zhang, F. and N. E. Leonard (2010), “Cooperative Control and Filtering for Cooperative Exploration,” IEEE Transactions on Automatic Control, 55(3):650-663, 2010. [published, refereed]
Zhang, F. (2010), “Geometric Cooperative Control of Particle Formations,” IEEE Transactions on Automatic Control, 55(3):800-803, 2010. [published, refereed]
Kim, J., F. Zhang, and M. Egerstedt (2010), “An exploration strategy by constructing Voronoi Diagrams with provable completeness,” Autonomous Robots, 29(3):367-380, 2010. [published, refereed]
Wu, W. and F. Zhang (2010), “Cooperative Exploration of Level Surfaces of Three Dimensional Scalar Fields,” Automatica, the IFAC Journal 47(9) 2044-2051. [published, refereed]
Szwaykowska, K. and F. Zhang (2011b), “Trend and Bounds for Error Growth in Controlled Lagrangian Particle Tracking,” IEEE Journal of Oceanic Engineering. [submitted, refereed]
Refereed Conference Proceedings:
Kim, J., F. Zhang, et al. (2008), “Curve Tracking Control for Autonomous Vehicles with Rigidly Mounted Range Sensors,” in Proc. 47th IEEE conference on decision and control, 5036-5041.[published, refereed]
Zhang, F., K. Szwaykowska, et al. (2008), “Task Scheduling for Control Oriented Requirements for Cyber-Physical Systems,” in Proc. IEEE Real Time Systems Symposium( RTSS 2008), 47-56. [published, refereed]
Zhang, F., Z. Shi, and W. Wolf (2009), “A dynamic battery model for co-design in cyber-physical systems,” in Proc. of 2nd International Workshop on Cyber-Physical Systems (WCPS 2009), 51-56. [published, refereed]
Szwaykowska K., F. Zhang, and W. Wolf (2009), “Tracking error under time delay and asynchronicity in distributed camera systems,” in Proc. of American Control Conferences(ACC2009), 4886-4891. [published, refereed]
Kim, J., F. Zhang and M. Egerstedt (2009), “Simultaneous Cooperative Exploration and Networking Based on Voronoi Diagrams,” in Proc. 2009 IFAC Workshop on Networked Robotics, 1-6. [published, refereed]
Zhang, F. and Z. Shi (2009), “Optimal and Adaptive Battery Discharge Strategies for Cyber-Physical Systems,” in Proc.48th IEEE Conference on Decision and Control, 6232-6237,Shanghai, China, 2009. [published, refereed]
Kim, J., F. Zhang, and M. Egerstedt (2009), “An exploration strategy based on construction of Voronoi diagrams,” in Proc.48th IEEE Conference on Decision and Control, 7024-7029, Shanghai, China, 2009. [published, refereed]
Yang, H. and F. Zhang (2009), “Geometric Formation Control for Autonomous Underwater Vehicles,” in Proc. 2010 IEEE Conference on Robotics and Automation, 4288-4293, 2009. [published, refereed]
Wu, W. and F. Zhang (2009), “Curvature Based Cooperative Exploration of Three Dimensional Scalar Fields,” in Proc. 2010 American Control Conferences (ACC 2010), 2909-2915. [published, refereed]
Szwaykowska, K. and F. Zhang (2010). A Lower Bound for Controlled Lagrangian Particle Tracking Error. Proc. 49th IEEE Conference on Decision and Control (CDC 2010) 4353-4358. [published, refereed]
Szwaykowska, K and F. Zhang (2011), “A Lower Bound on Navigation Error for Marine Robots Guided by Ocean Circulation Models ,” in Proc. 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2011). [published, refereed]
HONORS/AWARDS/PRIZES
Recipient: Fumin Zhang
Institution: Georgia Institute of Technology
Award: 2009 NSF CAREER Award
Sponsor: National Science Foundation
Recipient: Georgia Tech Savannah ROV team (Led by Fumin Zhang and Justin Shapiro)
Institution: Georgia Institute of Technology
Award: Design elegance award of the 2009 MATE international ROV competition
Sponsor: Marine Advanced Technology Education (MATE) Center
Recipient: Fumin Zhang
Institution: Georgia Institute of Technology
Award: 2010 ONR YIP Award
Sponsor: Office of Naval Research
Recipient: Fumin Zhang
Institution: Georgia Institute of Technology
Award: 2010 Lockheed Inspirational Young Faculty Award
Sponsor: Lockheed Martin Co.
Recipient: Fumin Zhang
Institution: Georgia Institute of Technology
Award: 2011 Roger P. Webb Outstanding Junior Faculty Award
Sponsor: School of Electrical and Computer Engineering, Georgia Tech
Recipient: Fumin Zhang
Institution: Georgia Institute of Technology
Award: Distinguished Lecturer on Cyber-Systems and Control
Sponsor: Zhejiang University, China
Recipient: Georgia Tech Savannah Robotics (Supervised by Fumin Zhang)
Institution: Georgia Institute of Technology
Award: 2011 Martin Klein MATE Mariner Award
Sponsor: Marine Advanced Technology Education (MATE) Center