Bio-Inspired Autonomous Control for Optimal Exploration and Exploitation in Marine Environments Award Number: N00014-09-1-1074 LONG-TERM GOALSThe long-term goal of the project is to develop innovative multidisciplinary investigation of autonomous collective foraging in a complex environment that explicitly integrates models and insights from biology with models and provable strategies from control theory. Our methods for autonomy will be rigorously developed and tightly integrated with experimentation. The project is a collaboration between Princeton University, Georgia Tech, and the Woods Hole Oceanographic Institution. OBJECTIVES The Georgia Tech activities focus on translating the biologically feasible systems behaviors obtained from both experimental observations and theoratical analysis into biologically inspired autonomy solutions to engineering systems. The technical objectives include the following: 1. Develop models for the coupling of spatial dynamics and information dynamics in exploration and exploitation problems and investigate how the coupled dynamics affect collective behavior. 2. Develop feasible motion patterns and control that are inspired by animal behaviors and verify the performance both theoratically and experimentally on engineering systems. 3. Design and implement autonomous surface vehicles and underwater vehicles to verify the engineering autonomy solutions. In addition, prepare for field test using commercially available autonomous underwater vehicles such as the YSI Ecomapper.
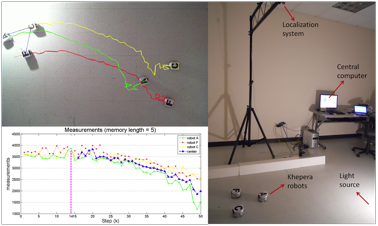
Figure 1. An experimental test-bed for biologically inspired exploration behaviors. Robots autonomously switch from individual exploration to cooperative exploration to locate a light source. The algorithms of cooperative robust filtering is verified. WORK COMPLETED 1. The information dynamics of cooperative exploration in three-dimensional space have been derived (Wu and Zhang 2011a).Based on this model, we have extended previous work on cooperative Kalman filtering(Zhang and Leonard 2010) to cooperative robust filtering. Figure 1 demonstrates a gradient climbing behavior based on cooperative robust filtering in unstructured and non-Gaussian noisy scalar field in a lab-based enviornment. We found that the cooperative filtering works under severe noise, when individual exploration strategies fail. A rigorous justification on the convergence of the cooperative robust filtering has been performed(Wu and Zhang 2010). The algorithms are also tested via experiments in Figure 1 (Wu and Zhang 2011b). 2. A switching strategy inspired by observations made through experiments on fish behaviors (Torney, Neufeld et al. 2009) has been developed to justify when should a group of engineering platforms change from individual exploration strategies to cooperative exploration strategies (Wu and Zhang 2010b). The strategy is inspired by biological findings that fishes only switch to cooperation when they are not confident about the environment and the information gathered. However, we found that confidence alone is hard to measure and difficult to be implemented on engineering systems. Instead, we found that the rate of convergence is an easier criterion to measure how confident an individual is. We are able to rigorously justify the convergence of the switching behaviors. The switching behavior has also been implemented on the test-bed in Figure 1. 3. We have developed an Autonomous Surface Vessel (ASV) named GTS-Victoria. Victoria enters the final in the 4th AUVSI and ONR international RoboBoat competition and placed 7th among15 universities, see Figure 2. Equipped with oil sensors, Victoria performed autonomous oil survey experiments at Grand Isles, LA where heavy pollutions occurred during the 2010 BP Oil Spill Event.
RESULTS 1. Cooperative robust filtering and control can be applied to effectively explore scalar fields with unstructured, non-Gaussian noise that are difficult for individual exploration strategies. 2. A biological inspired switching strategy between individual exploration strategy and cooperative strategy may results in a balance between exploration performance and cost of communication and collaboration. 3. Experimental platform development proved to be a necessary and important link between theoratical autonomy algorithms and practical autonomous behaviors. Platform reliability is a challenge for any autonomy algorithms, which should be given more attention.
REFERENCES Torney, C., Z. Neufeld, et al. (2009), "Context-dependent interaction leads to emergent search behavior in social aggregates." Proceedings of the National Academy of Sciences, 106(52): 22055-22060. Wu, W. and F. Zhang (2011a), “Cooperative Exploration of Level Surfaces of Three Dimensional Scalar Fields,” Automatica, the IFAC Journal, (In Print). Wu, W. and F. Zhang (2011b), “Experimental Validation of Source Seeking with a Switching Strategy,” Proc. 2011 IEEE Conference on Robotics and Automation (ICRA 2011), 3835-3840. Journal articles: Kim, J., F. Zhang, and M. Egerstedt (2009), “Curve Tracking Control for Autonomous Vehicles with Rigidly Mounted Range Sensors,” Journal of Intelligent and Robotic Systems, 56(1-2): 177-197. [published, refereed] Zhang, F. and N. E. Leonard (2010), “Cooperative Control and Filtering for Cooperative Exploration,” IEEE Transactions on Automatic Control, 55(3) 650-663. [published, refereed] Zhang, F. (2010), “Geometric Cooperative Control of Particle Formations,” IEEE Transactions on Automatic Control, 55(3) 800-803. [published, refereed] Kim, J., F. Zhang, and M. Egerstedt (2010), “An exploration strategy by constructing Voronoi Diagrams with provable completeness,” Autonomous Robots, 29(3): 367-380. [published, refereed] Wu, W. and F. Zhang (2011), “Cooperative Exploration of Level Surfaces of Three Dimensional Scalar Fields,” Automatica, the IFAC Journal, (In Print).[accepted, refereed] Refereed Conference Proceedings: Kim, J., F. Zhang and M. Egerstedt (2009), “Simultaneous Cooperative Exploration and Networking Based on Voronoi Diagrams,” in Proc. 2009 IFAC Workshop on Networked Robotics, 1-6. [published, refereed] Zhang, F. and Z. Shi (2009), “Optimal and Adaptive Battery Discharge Strategies for Cyber-Physical Systems,” in Proc.48th IEEE Conference on Decision and Control, 6232-6237, Shanghai, China, 2009. [published refereed] Kim, J., F. Zhang, and M. Egerstedt (2009), “An exploration strategy based on construction of Voronoi diagrams,” in Proc.48th IEEE Conference on Decision and Control, 7024-7029, Shanghai, China, 2009. [published, refereed] Yang, H. and F. Zhang (2010), “Geometric Formation Control for Autonomous Underwater Vehicles,” in Proc. 2010 IEEE Conference on Robotics and Automation, 4288-4293. [published, refereed] Wu, W. and F. Zhang (2010a), “Curvature Based Cooperative Exploration of Three Dimensional Scalar Fields,” in Proc. 2010 American Control Conferences, 2909-2915. [published, refereed] Wu, W. and F. Zhang (2010b), “A Switching Strategy for Robust Cooperative Exploration,” in Proc.49th IEEE Conference on Decision and Control (CDC 2010), 5493-5498. [published, refereed] Wu, W. and F. Zhang (2011), “Experimental Validation of Source Seeking with a Switching Strategy,” in Proc. 2011 IEEE Conference on Robotics and Automation (ICRA 2011), 3835-3840. HONORS/AWARDS/PRIZES Recipient: Georgia Tech Savannah ROV team (Led by Fumin Zhang and Justin Shapiro) Recipient: Fumin Zhang Recipient: Fumin Zhang Recipient: Fumin Zhang Recipient: Fumin Zhang Recipient: Georgia Tech Savannah Robotics (Supervised by Fumin Zhang)
|