This page shows early history (2007-2009) of Georgia Tech Savannah Robotics (GTSR). Please follow the link to see the latest news on GTSR's official site.
GTS ROV-Alpha won the Design Excellence Award in the 2009 M.A.T.E. International ROV competition. Supervisor: Dr. Fumin Zhang |
|
Vehicle History
|
Version 1 (06/08-11/08) is simply a Pelican box settled in a frame composed of adhered PVC pipes. Different sealing options are tested on the box. Thruster mounting options are evaluated.
|
Version 2:
|
Version 2 (12/08-02/09) improves version 1 by adding potections for thrusters and space for mounting sensors. Buoyance test in water are performed. |
Version 3: |
Version 3 (02/09-03/09) improves version 2 by replacing the box with a large PVC tube, which reduces the buoyancy. |
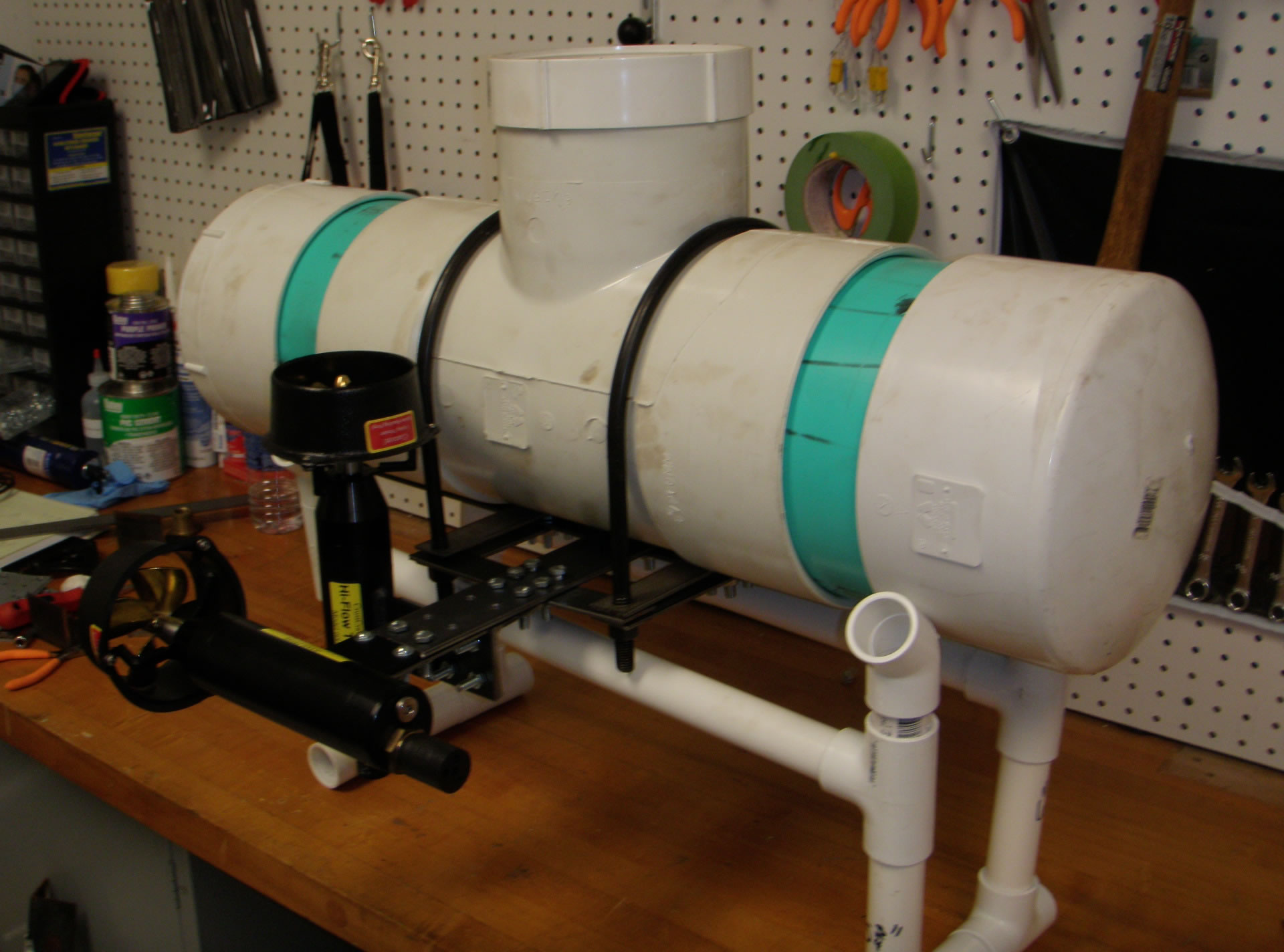
Version 4:
|
Version 4 (04/09-06/09) marks a significant re-design. The Housing is further shrinked in length to reduce bouyancy. A T-section PVC pipe is used for easier access to internal electronic devices. Frames of PVC pipes are replaced by u-bolts and iron bars to increase structural strength. (The PVC frame at the bottom is only used for supporting vehicles on the workbench.) |
Version 5:
|
Award Winning Version 5 (06/09-) marks a complete re-design. The housing is now all alluminum. No PVC anymore. All electronics are mounted on a internal shell that can be easily pulled out with the encap. A claw is added for underwater manipulation, and a mating skirt is added to complete MATE competition missions. The vehicle competed in the 2009 MATE international ROV competition and won the Design Excellence award. |